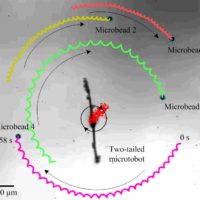
Controlled non-contact manipulation of non-magnetic untethered microbeads orbiting two-tailed microrobot Journal articles Read full-text Watch video