
Acoustically powered microrobotics
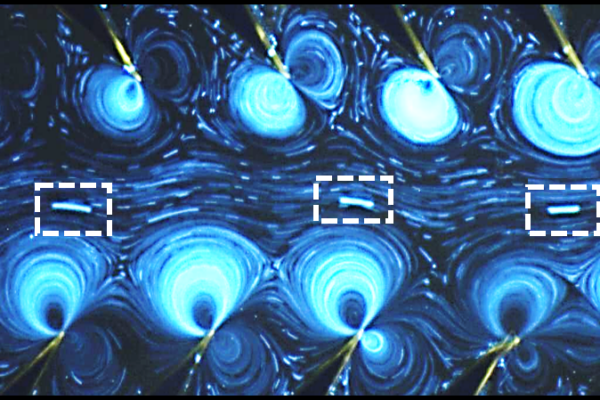
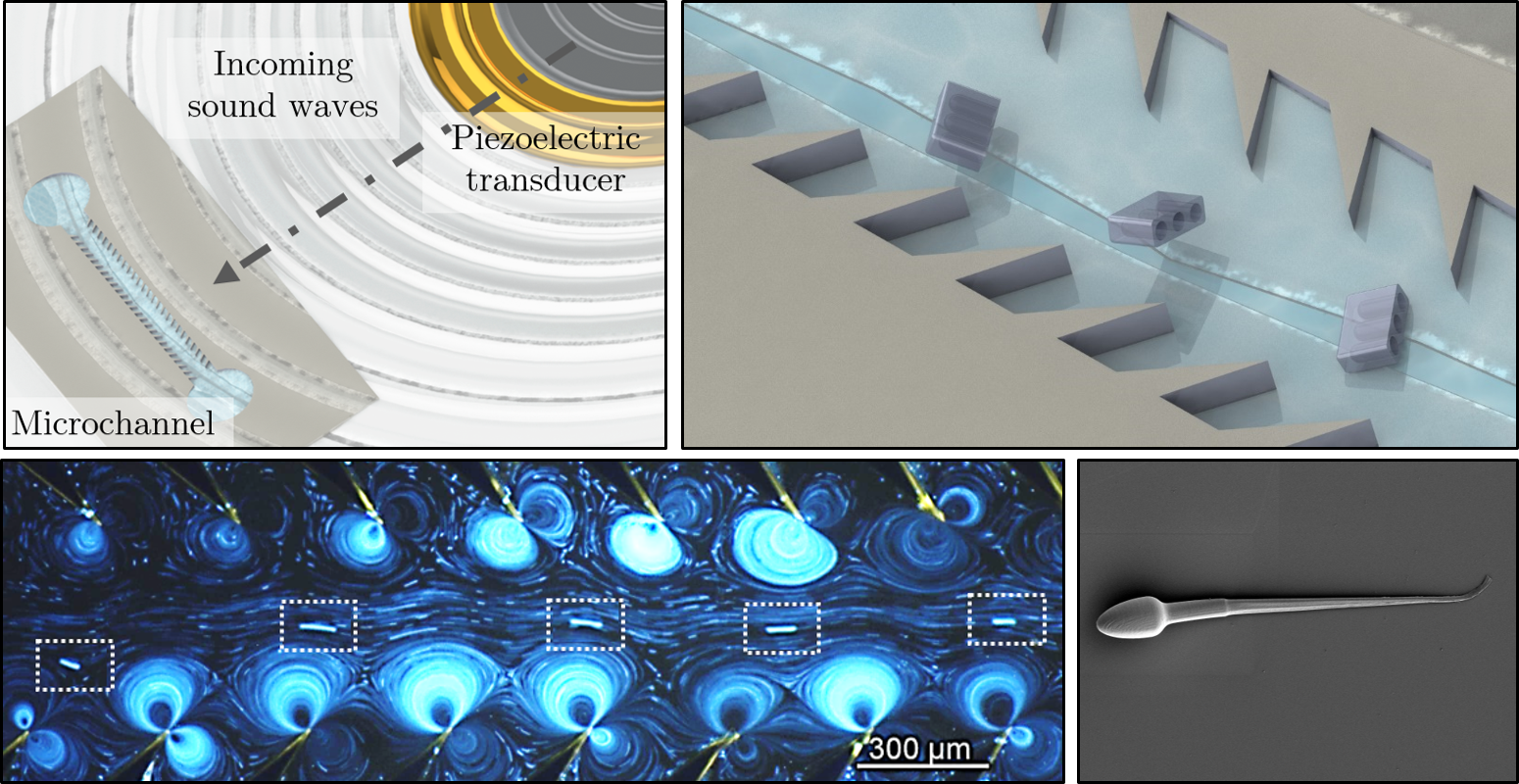 Harvesting sound energy to levitate grain particles has been ubiquitously employed as an effective way of indirect manipulation in microsystems. Inspired from this approach, acoustic resonance of micro-scale structures to traveling sound waves has paved way for diverse lab-on-a-chip applications. These vibrational structures in microchannels acts like an acoustic transformer by scattering sound waves to create pressure difference across different regions of the channels. The underlying principle here capitalizes on the sound-fluid interactions in the channels based on different acoustic frequencies. Hence, the method of multiplexing between sound frequencies enables a directional transport of micro-robots. As a result, this acoustically steerable flow can facilitate movement of entities like microrobots or drug loaded agents in channels resembling human vasculatures. Thus, establishing pressure disturbances to generate an artificial flow in the medium has been a latest development for contactless actuation of these microrobots. Alternatively, synthesis of microrobots with on-board vibrational units furthers their localized control, providing foundation for next generation acoustically-powered propellers. Our vision combines these approaches to advance the field of microrobotics by finessing the control of microrobots and drug-carrying biological and hybrid micro-agents.
Harvesting sound energy to levitate grain particles has been ubiquitously employed as an effective way of indirect manipulation in microsystems. Inspired from this approach, acoustic resonance of micro-scale structures to traveling sound waves has paved way for diverse lab-on-a-chip applications. These vibrational structures in microchannels acts like an acoustic transformer by scattering sound waves to create pressure difference across different regions of the channels. The underlying principle here capitalizes on the sound-fluid interactions in the channels based on different acoustic frequencies. Hence, the method of multiplexing between sound frequencies enables a directional transport of micro-robots. As a result, this acoustically steerable flow can facilitate movement of entities like microrobots or drug loaded agents in channels resembling human vasculatures. Thus, establishing pressure disturbances to generate an artificial flow in the medium has been a latest development for contactless actuation of these microrobots. Alternatively, synthesis of microrobots with on-board vibrational units furthers their localized control, providing foundation for next generation acoustically-powered propellers. Our vision combines these approaches to advance the field of microrobotics by finessing the control of microrobots and drug-carrying biological and hybrid micro-agents.