
Multi steerable catheters for cardiac interventions
SRL develops systems to control steerable instruments to compensate for beating heart motion.
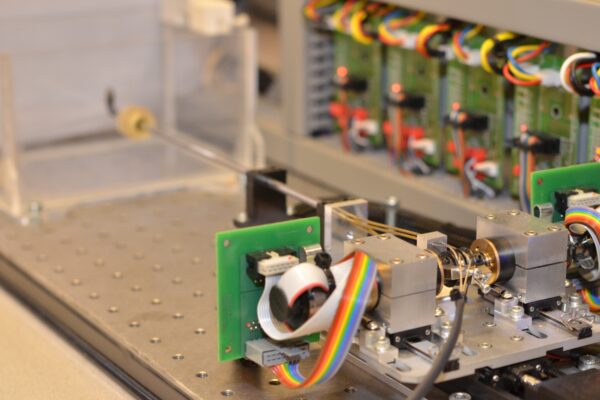
![]() The challenges encountered during catheter-based cardiac interventions are: The absence of vessel wall support, the complexities of the 3D shape of the ventricles, blood flow and tissue motion caused by respiration and heartbeat cycle. The objective of this research is to control a catheter with an actuated tip in order to allow utilization of various cardiac interventions without requiring open heart surgery. An controller is to be developed which provides force-position feedback and considers a human-in-the-loop to accurately position the catheter within the beating heart. Additional project information is available at the iMIT (Instruments for Minimally Invasive Techniques) website.
The challenges encountered during catheter-based cardiac interventions are: The absence of vessel wall support, the complexities of the 3D shape of the ventricles, blood flow and tissue motion caused by respiration and heartbeat cycle. The objective of this research is to control a catheter with an actuated tip in order to allow utilization of various cardiac interventions without requiring open heart surgery. An controller is to be developed which provides force-position feedback and considers a human-in-the-loop to accurately position the catheter within the beating heart. Additional project information is available at the iMIT (Instruments for Minimally Invasive Techniques) website.