
Real-time shape sensing for flexible instruments
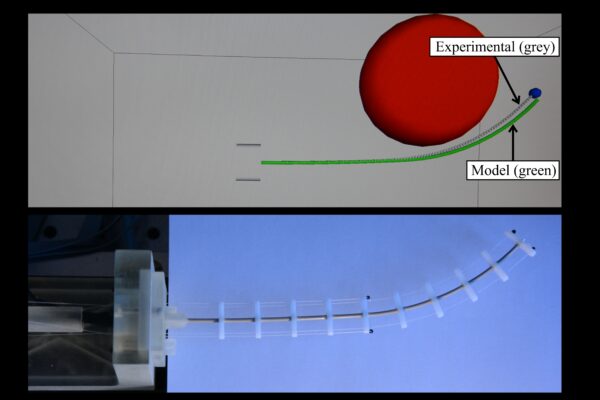
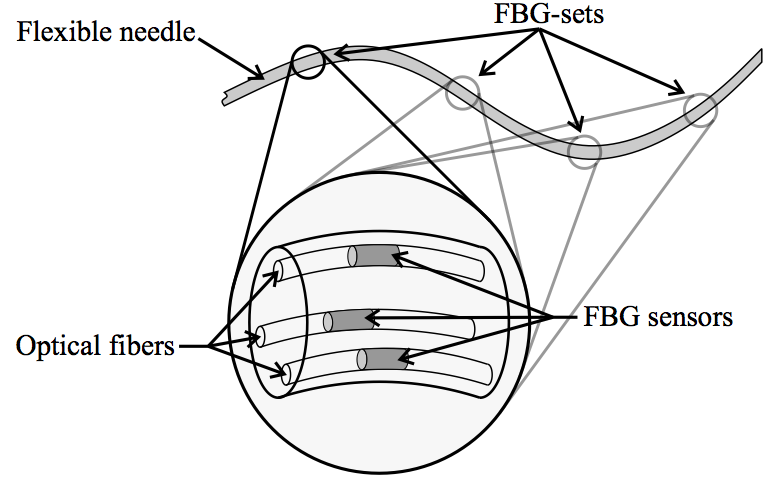 Flexible minimally invasive surgical instruments can be used to reach difficult-to-reach locations within the human body. Accurately steering these instruments requires information about the shape of the instrument. In this project, we use an array of Fiber Bragg Grating (FBG) sensors to reconstruct the shape of a flexible instrument. FBG sensors have several advantages over existing imaging modalities, which makes them well-suited for use in a clinical environment. We also develop experimental testbeds which includes a tendon-driven continuum manipulator to evaluate our shape sensing algorithms. The 3D manipulator shape is used to steer the manipulator along various trajectories while accounting for environmental uncertainties.
Flexible minimally invasive surgical instruments can be used to reach difficult-to-reach locations within the human body. Accurately steering these instruments requires information about the shape of the instrument. In this project, we use an array of Fiber Bragg Grating (FBG) sensors to reconstruct the shape of a flexible instrument. FBG sensors have several advantages over existing imaging modalities, which makes them well-suited for use in a clinical environment. We also develop experimental testbeds which includes a tendon-driven continuum manipulator to evaluate our shape sensing algorithms. The 3D manipulator shape is used to steer the manipulator along various trajectories while accounting for environmental uncertainties.