
Ultrasound-guided flexible needle steering
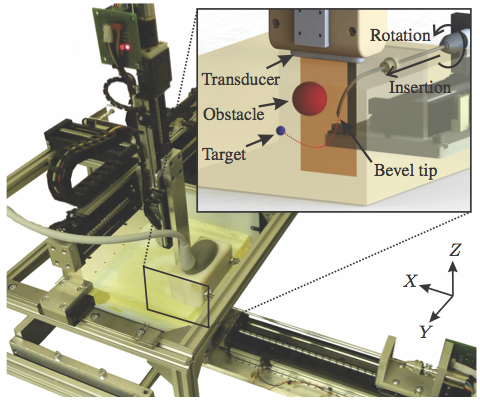
 Manual percutaneous insertion of rigid needles is commonly performed during minimally invasive surgery. These needles often deviate from their intended paths due to organ deformation, tissue inhomogeneity, anatomical obstructions, and physiological processes. Inaccurate needle placement may result in ineffective treatment, misdiagnosis, or traumatic effects due to medical complications. As part of this project, we develop 3D ultrasound-guided control systems to robotically steer flexible needles to a target. We integrate 3D tracking, path planning and control algorithms to steer a bevel-tipped flexible needle to reach a target in 3D space while avoiding obstacles. Currently, the targeting accuracy of our control algorithm is sufficient to reach the lesions (less than 2 mm) in biological tissue.
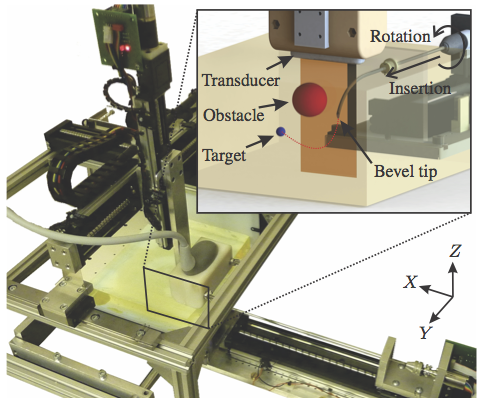
Manual percutaneous insertion of rigid needles is commonly performed during minimally invasive surgery. These needles often deviate from their intended paths due to organ deformation, tissue inhomogeneity, anatomical obstructions, and physiological processes. Inaccurate needle placement may result in ineffective treatment, misdiagnosis, or traumatic effects due to medical complications. As part of this project, we develop 3D ultrasound-guided control systems to robotically steer flexible needles to a target. We integrate 3D tracking, path planning and control algorithms to steer a bevel-tipped flexible needle to reach a target in 3D space while avoiding obstacles. Currently, the targeting accuracy of our control algorithm is sufficient to reach the lesions (less than 2 mm) in biological tissue.