

Magnetically-actuated bio-inspired soft robots
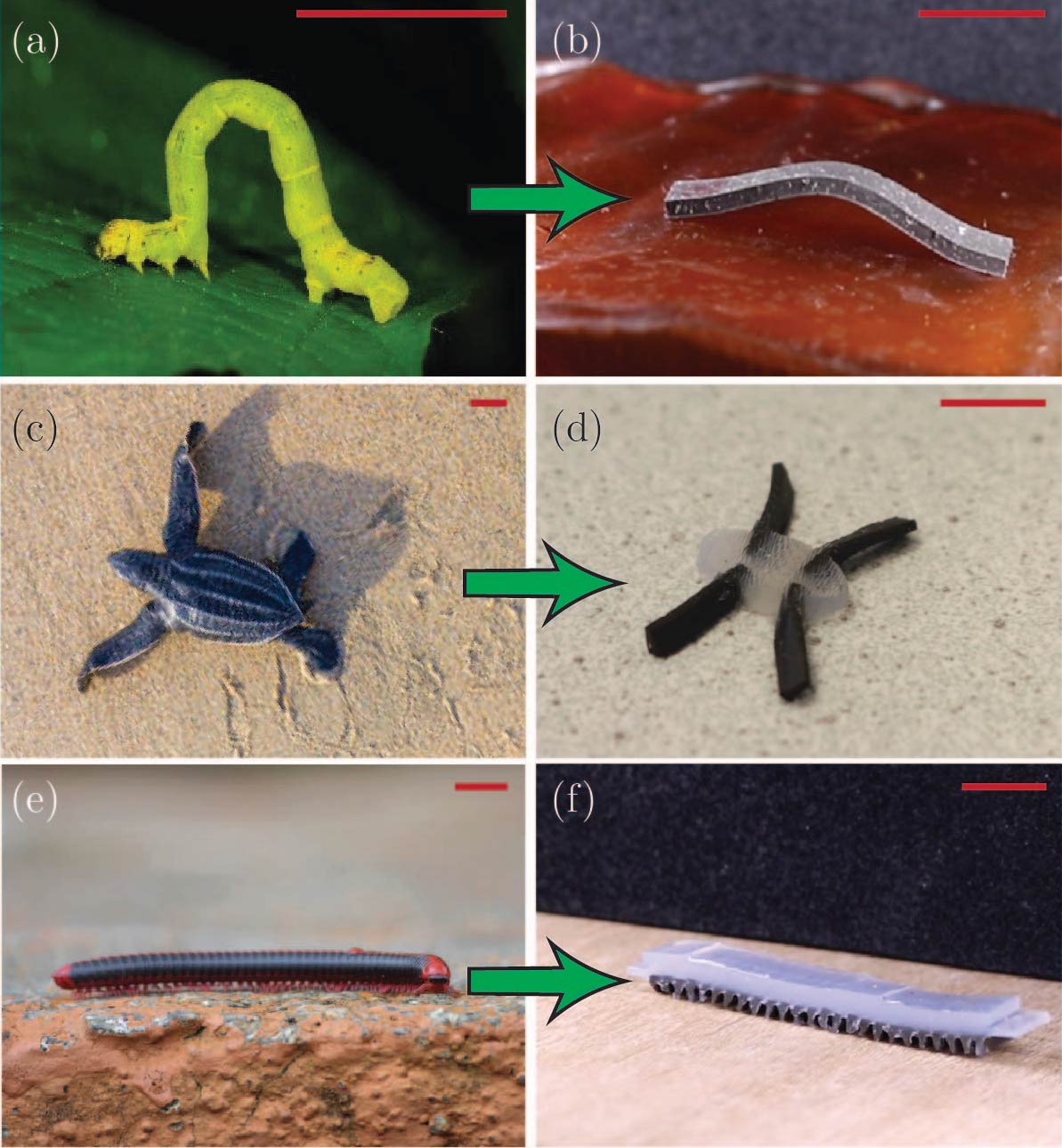 Magnetic actuation has the advantages of requiring no on-board power source, untethered control and easy “programmability”. Our aim to harness the advantages of magnetism and develop small-scale bio-inspired soft robots for potential applications in minimally invasive surgery (MIS). In this project, the focus is on design and development of millimeter-scale soft robots that can be controlled remotely using magnetic fields. Various methods for design and fabrication of function soft devices are investigated. Bioinspiration plays a key role in this project. Methods for modeling of robot behavior and tracking and control of existing specimens are also studied. Example applications include diagnostic imaging, biopsy, drug delivery.
Magnetic actuation has the advantages of requiring no on-board power source, untethered control and easy “programmability”. Our aim to harness the advantages of magnetism and develop small-scale bio-inspired soft robots for potential applications in minimally invasive surgery (MIS). In this project, the focus is on design and development of millimeter-scale soft robots that can be controlled remotely using magnetic fields. Various methods for design and fabrication of function soft devices are investigated. Bioinspiration plays a key role in this project. Methods for modeling of robot behavior and tracking and control of existing specimens are also studied. Example applications include diagnostic imaging, biopsy, drug delivery.