
MR-compatible robotics
SRL develops MR-compatible robotic systems for interventions in the prostate.
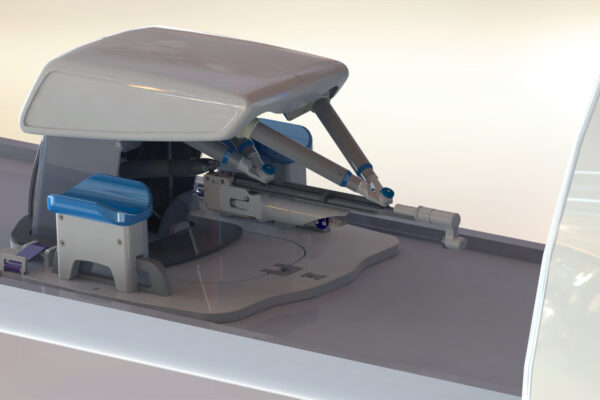
![]() Prostate cancer is the most frequently diagnosed malignancy in the male population. Early stage cancer can be visualied by magnetic resonance (MR) images. However, MR-guided needle steering faces many challenges, such as, space constraints, concerns about electromagnetic compatibility and low frequency rate of MR images. The MIRIAM (Minimally Invasive Robotics In An MR environment) project aims at designing an MR-safe system for prostate cancer biopsy. As part of MIRIAM, we are developing the high level controller, which includes the patient-specific biomechanical models, path planner and needle steering algorithm. All components will be integrated in an MR-compatible robotic system which will be developed as part of MIRIAM.
Prostate cancer is the most frequently diagnosed malignancy in the male population. Early stage cancer can be visualied by magnetic resonance (MR) images. However, MR-guided needle steering faces many challenges, such as, space constraints, concerns about electromagnetic compatibility and low frequency rate of MR images. The MIRIAM (Minimally Invasive Robotics In An MR environment) project aims at designing an MR-safe system for prostate cancer biopsy. As part of MIRIAM, we are developing the high level controller, which includes the patient-specific biomechanical models, path planner and needle steering algorithm. All components will be integrated in an MR-compatible robotic system which will be developed as part of MIRIAM.