
Magnetic microrobotics
Magnetic microrobots provide opportunities in the fields of biological micromanipulation and minimally invasive surgery.
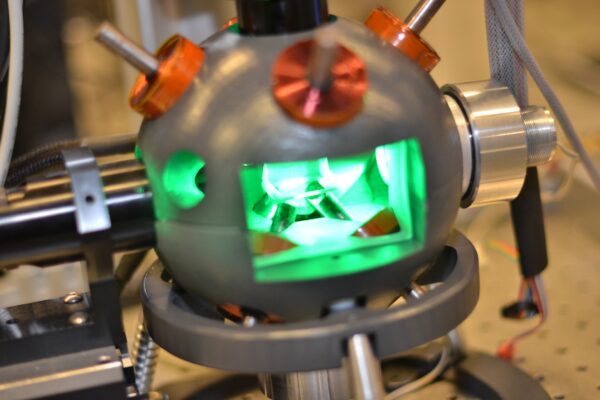
Connecting the dots between science fiction and Feynman’s vision, the multifaceted field of micro-robotics has revolutionized the way clinical practices are now perceived. These  microrobots when controlled with adequate precision, can have an outreach surpassing modern day surgical interventions in targeting obscure and hard to reach tissues. Capitalizing the advent of microfabrication at the interface of applied physics and engineering, this technology has enabled entities at sub-mm scale to be powered for indirect means of micromanipulation premised upon magnetism. Dexterous instrumentation and control of electromagnetic coils has enabled one such pathway for maneuvering multiple micro-robots by three dimensional manipulation of magnetic field. Based on this principle of manipulation, an assembly of electromagnetic coils has been designed to maneuver multiple such magnetic microrobots in closed loop trajectories thereby emulating an artificial construct of targeted drug delivery.
microrobots when controlled with adequate precision, can have an outreach surpassing modern day surgical interventions in targeting obscure and hard to reach tissues. Capitalizing the advent of microfabrication at the interface of applied physics and engineering, this technology has enabled entities at sub-mm scale to be powered for indirect means of micromanipulation premised upon magnetism. Dexterous instrumentation and control of electromagnetic coils has enabled one such pathway for maneuvering multiple micro-robots by three dimensional manipulation of magnetic field. Based on this principle of manipulation, an assembly of electromagnetic coils has been designed to maneuver multiple such magnetic microrobots in closed loop trajectories thereby emulating an artificial construct of targeted drug delivery.
 Magnetic microrobots provide opportunities in the fields of biological micromanipulation and minimally invasive surgery (e.g., micromanipulation of cells, ophthalmic microsurgery and development of new drugs). A major requirement for implementation of these microrobotic applications is precise control of the microrobots. This project focusses on developing electromagnetic systems and techniques for image-based magnetic control of self-propelled and biologically-inspired microrobots.
Magnetic microrobots provide opportunities in the fields of biological micromanipulation and minimally invasive surgery (e.g., micromanipulation of cells, ophthalmic microsurgery and development of new drugs). A major requirement for implementation of these microrobotic applications is precise control of the microrobots. This project focusses on developing electromagnetic systems and techniques for image-based magnetic control of self-propelled and biologically-inspired microrobots.